RISC-V架构定义了4种特权级别,其中只有M模式是必须实现的,其余特权级别可以根据运行在CPU上的应用需求进行调整。
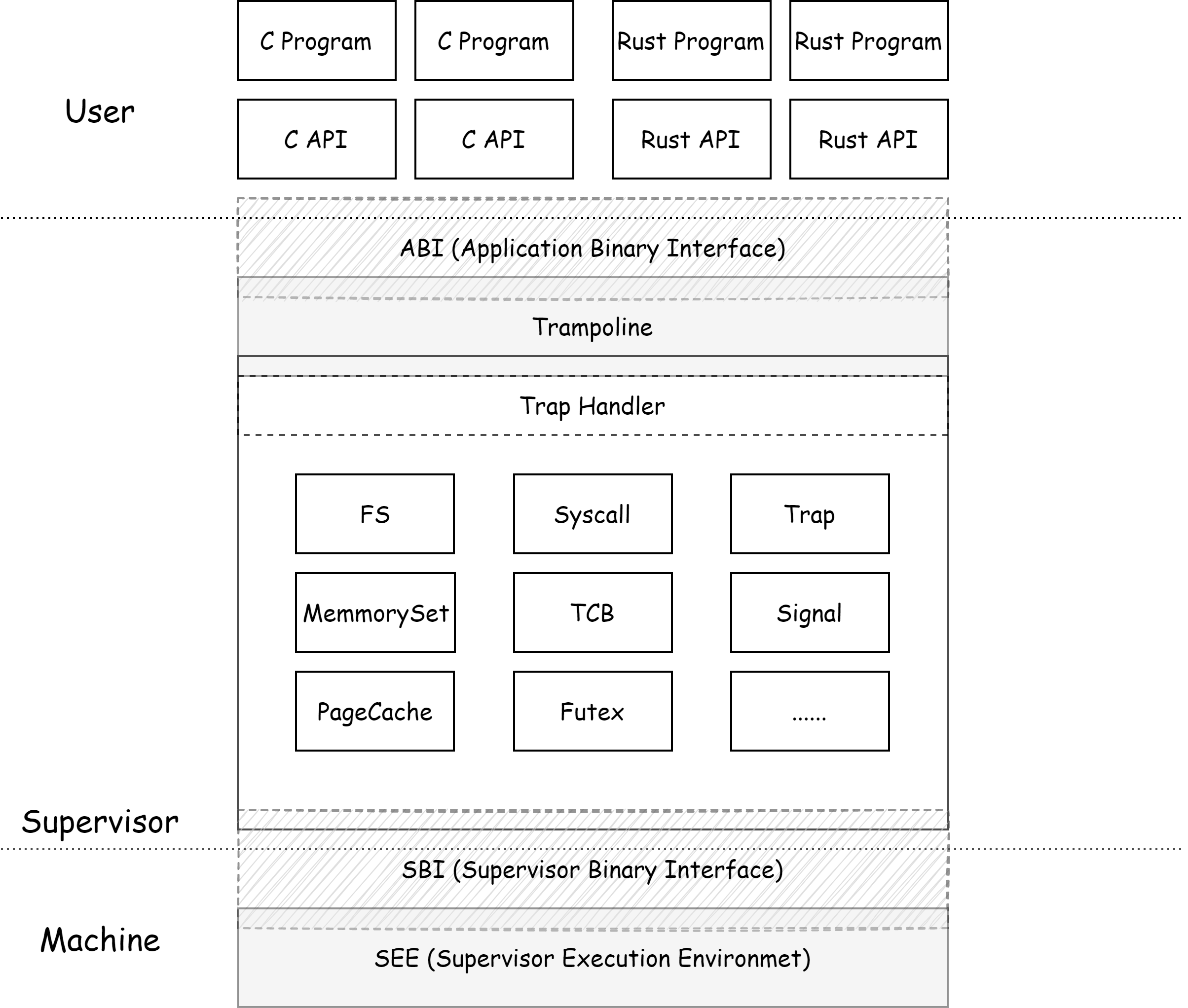
BTD OS涉及M/S/U三种特权级别,可以根据运行时的特权级别分为三个部分:
- 用户/应用模式 (U, User/Application):用户应用程序运行在 U 态。具有最低限度的权限,无法读写特权级寄存器,也无法修改S态和M态的内存空间,只能通过系统调用或异常中断等方式与S态进行交互。
- 监督模式 (S, Supervisor):操作系统的内核运行在 S 态,是用户程序的运行环境。在这个模式下,内核需要协调调度进程、响应用户的系统调用请求、管理进程的内存空间以及控制设备的IO操作等。
- 机器模式 (M, Machine):监督模式执行环境 (SEE, Supervisor Execution Environment) 运行在 M 模式上,负责完成与硬件相关的初始化等工作,如在操作系统运行前负责加载操作系统的 Bootloader – RustSBI,是操作系统内核的运行环境。
在 RISC-V 中,各模式使用 ecall 指令与对应模式下的 ret 指令进行特权级切换,对于用户模式(即用户态)切 换到监督模式(即内核态),主要是使用内核提供的提供了 ABI(Application Binary Interface)接口,即 BTD OS 实现的系统调用。对于监督模式切换到机器模式,我们选择使用 OpenSBI,它是运行在更底层的 M 模式特权级下的软件,实现了对硬件的控制,如串口输入输出、多核心启动、操作系统的关机等操作,是操作系统内核的执行环境。
!
目录树介绍
src
├── board
│ ├── fu740.rs
│ ├── mod.rs
│ └── qemu.rs
├── boards
│ └── qemu.rs
├── console.rs
├── consts.rs
├── drivers
│ ├── fu740
│ │ ├── mod.rs
│ │ ├── plic.rs
│ │ ├── prci.rs
│ │ ├── sdcard.rs
│ │ └── spi.rs
│ ├── mod.rs
│ └── qemu
│ ├── mod.rs
│ ├── virtio_blk.rs
│ └── virtio_impl.rs
├── entry.S
├── fs
│ ├── fat32
│ │ ├── file.rs
│ │ └── mod.rs
│ ├── file.rs
│ ├── mod.rs
│ ├── mount.rs
│ ├── page.rs
│ ├── page_cache.rs
│ ├── pipe.rs
│ └── stdio
│ ├── mod.rs
│ ├── stdin.rs
│ └── stdout.rs
├── logging.rs
├── macros
│ ├── hsm.rs
│ ├── mod.rs
│ ├── on_boot.rs
│ └── profile.rs
├── main.rs
├── mm
│ ├── address.rs
│ ├── frame_allocator.rs
│ ├── kernel_heap_allocator.rs
│ ├── kvmm.rs
│ ├── memory_set.rs
│ ├── mmap.rs
│ ├── mod.rs
│ ├── page_table.rs
│ ├── permission.rs
│ ├── shared_memory.rs
│ ├── user_buffer.rs
│ └── vm_area.rs
├── panic.rs
├── sbi.rs
├── syscall
│ ├── dispatcher.rs
│ ├── errno.rs
│ ├── futex.rs
│ ├── impls
│ │ ├── fs.rs
│ │ ├── futex.rs
│ │ ├── mm.rs
│ │ ├── mod.rs
│ │ ├── others.rs
│ │ └── process.rs
│ └── mod.rs
├── task
│ ├── context.rs
│ ├── id.rs
│ ├── initproc
│ │ ├── busybox
│ │ ├── initproc.S
│ │ ├── mod.rs
│ │ └── test_all_custom.sh
│ ├── kstack.rs
│ ├── manager
│ │ ├── hanging_task.rs
│ │ ├── mod.rs
│ │ └── task_manager.rs
│ ├── mod.rs
│ ├── processor
│ │ ├── mod.rs
│ │ ├── processor.rs
│ │ └── schedule.rs
│ ├── signal.rs
│ ├── switch
│ │ ├── mod.rs
│ │ └── switch.S
│ └── task.rs
├── timer.rs
└── trap
├── context.rs
├── handler.rs
├── mod.rs
└── trampoline.S